信息安全工程师案例分析每日一练试题(2019/4/10)
 分享到微信
分享到微信
信息安全工程师案例分析当天每日一练试题地址:www.cnitpm.com/exam/ExamDayAL.aspx?t1=6
往期信息安全工程师每日一练试题汇总:www.cnitpm.com/class27-6-1.aspx
信息安全工程师案例分析每日一练试题(2019/4/10)在线测试:www.cnitpm.com/exam/ExamDayAL.aspx?t1=6&day=2019/4/10
信息安全工程师案例分析每日一练试题内容(2019/4/10)
阅读以下关于机器人操作系统架构的描述,回答问题1至问题3【说明】
随着人工智能技术的发展,工业机器人已成为当前工业界的热点研究对象。某宇航设备公司为了扩大业务范围,决策层研究决定准备开展工业机器人研制新业务。公司将论证工作交给了软件架构师王工,王工经过分析和调研,从机器人市场现状、领域需求、组成及关键技术和风险分析等方面开展了综合论证。论证报告指出:首先,为了保障本公司机器人研制的持续性,应根据领域需求选择一种适应的设计架构;其次,为了规避风险,公司的研制工作不能从零开始,应该采用国际开源社区所提供机器人操作系统 (Robot Operating System ,ROS)作为机器人开发的基本平台。
在讨论会上,架构师李工提出不同意见,他认为公司针对宇航领域已开发了某款嵌 入式实时操作系统,且被多种宇航装备使用,可靠性较高。因此应该采用现有架构体系作为机器人的开发平台。会上王工说明了机器人操作系统与该款操作系统的差别,要沿用需要进行改造,技入较大。经过激烈讨论,公司领导同意了王工采用 ROS的意见。
问题:3.1(5分)
王工拟采用的ROS具有分布式进程框架,以点对点设计以及服务和节点管理器方式, 使得执行程序可以各自独立地设计,松散地、实时地组合起来。这些进程可以按照功能包和功能包集的方式分组,因而可以容易地分享和发布。请用400字以内文字说明ROS与嵌入式实时操作系统的共同点,以及在实时性和任务通信方式两个方面的差异。
问题:3.2 (10分)
ROS为应用程序间通信提供了主题(Topic) 、服务 (Service)和动作 (Action) 三种消息通信方式,每种通信方式都有其特点。请将以下给出的三类通信的主要特点填入表3-1中(1)-(5) 的空白处,将答案写在答题纸上。
(a) 适合用于传输传感器信息〈数据流)
(b) 能够知道是否调用成功
(c) 一对多模式
(d) 有握手信号
(e) 服务执行完会有反馈
(f) 可以监控长时间执行的进程
(g) 较复杂
(h) 可能让系统过载(数据太多)
(i) 服务执行完之前,程序会等待
(j) 建立通信较慢
(k) 可能丢失数据

问题:3.3 (10分)
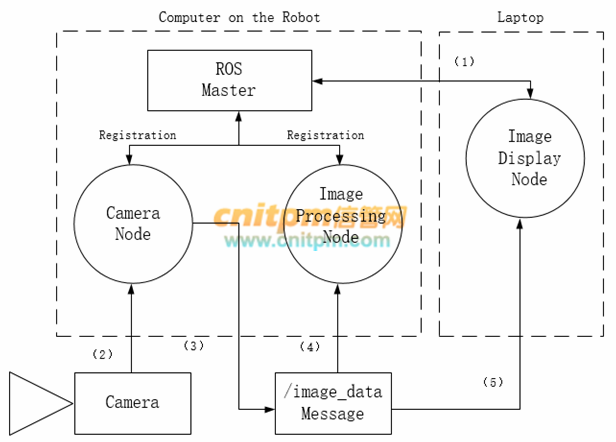
ROS 的架构定义了ROS系统由多个各自独立的节点(组件〉组成,并且各个节点之间可以通过发布/订阅(Publish/Subscribe )消息模型进行通信。图 3-1给出一个简单机器人结构实例,请根据以下文字描述,补充图3-1 中(1)~(5) 处空白,将答案写在答题纸上。
"机器人开始阶段,所有节点都要注册 (Registration) 到Master上,注册后,摄像头节点声明它要发布(Publish)一个叫做/image_data的消息。另外两个节点(图像处理处理节点和图像显示节点)声明它们需要订阅( Subscribe) 这个/image_data消息。因此, 一旦摄像头节点收到相机发送的数据(Data),就立即将数据/image_data直接发送到另外两个节点。
信管网试题答案与解析:www.cnitpm.com/st/393761899.html
信管网考友试题答案分享:
信管网试题答案与解析:www.cnitpm.com/st/393761899.html 扫码关注公众号
扫码关注公众号
 温馨提示:因考试政策、内容不断变化与调整,信管网网站提供的以上信息仅供参考,如有异议,请以权威部门公布的内容为准!
温馨提示:因考试政策、内容不断变化与调整,信管网网站提供的以上信息仅供参考,如有异议,请以权威部门公布的内容为准!
信管网致力于为广大信管从业人员、爱好者、大学生提供专业、高质量的课程和服务,解决其考试证书、技能提升和就业的需求。
信管网软考课程由信管网依托10年专业软考教研倾力打造,官方教材参编作者和资深讲师坐镇,通过深研历年考试出题规律与考试大纲,深挖核心知识与高频考点,为学员考试保驾护航。面授、直播&录播,多种班型灵活学习,满足不同学员考证需求,降低课程学习难度,使学习效果事半功倍。
相关内容
| 发表评论 查看完整评论 | |




推荐文章
各省市软考报名简章
信管网APP下载
